Для настройки фильтрации данных необходимо перейти в меню "Транспорт", выбрать ТС или группу ТС для настройки, затем перейти в раздел настроек Расчет – Фильтрация и коррекция на вкладке "Фильтрация".
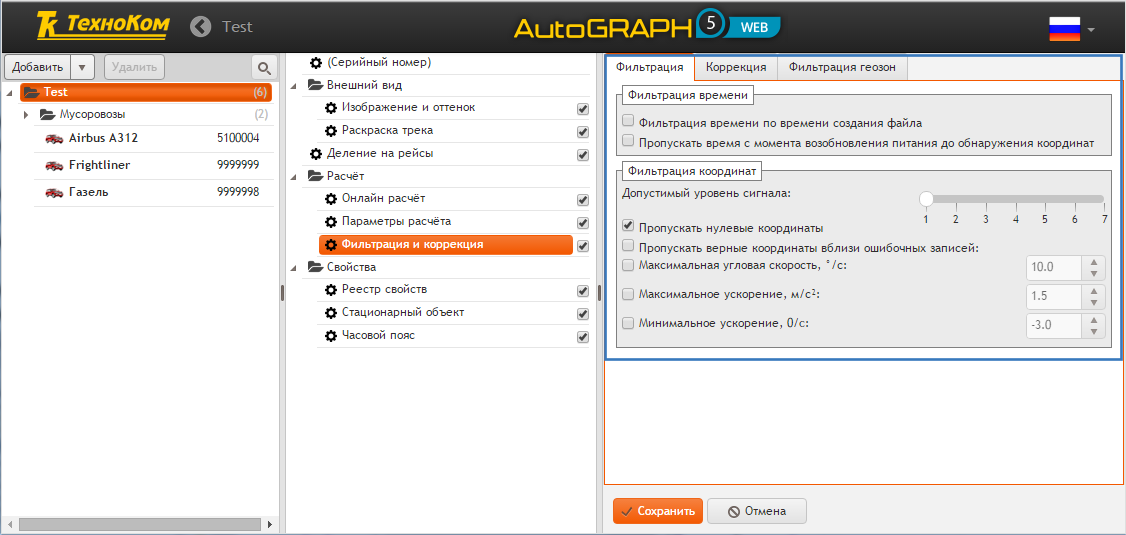
Рис.1. Фильтрация данных.
Настройки фильтров рекомендуется подбирать опытным путем до достижения желаемых результатов.
Фильтрация времени
В некоторых случаях в записях прибора могут появляться броски времени. Фильтры времени позволяют отфильтровать эти ошибочные записи, основываясь на времени создания файла, в котором эти ошибки встречаются. Новый файл с данными создается в каждый понедельник в 0:00:00 по времени сервера.
Предусмотрены следующие фильтры времени:
Фильтрация времени по времени создания файла – пропуск данных, если время записи этих данных не согласуется со временем создания файла.
Пропускать время с момента возобновления питания до обнаружения координат – пропускать время записей после включения прибора до обнаружения координат. Отфильтрованное время будет заменено временем, определенным после определения координат.
Фильтрация координат
При неуверенном приеме сигнала со спутников, на участках дороги с крутыми поворотами или при отсутствии достаточной видимости небосвода координаты ТС могут быть определены с ошибкой. Фильтры координат позволяют исключить подобные ошибки, опираясь на уровень навигационного сигнала, предельные значения скоростей и ускорения, а также введением окна фильтрации вблизи ошибочных записей.
Предусмотрены следующие способы фильтрации координатных записей:
Фильтрация по допустимому уровню сигнала (настройка «Допустимый уровень сигнала») – фильтр позволяет задать минимальный уровень сигнала, достаточный для достоверного определения сигнала. При уровне сигнала ниже допустимого координаты считаются недостоверными и не участвуют в вычислениях. Допустимый уровень сигнала необходимо подбирать опытным путем в зависимости от условий приема сигнала со спутников и расположения
ГЛОНАСС/GPS антенны на ТС.
Пропускать нулевые координаты – фильтр позволяет отфильтровать записи с нулевыми координатами, которые являются неверными. Фильтр предназначен для сторонних навигационных терминалов, которые, в случае неверных координат, делают запись с нулевыми координатами.
Пропускать верные координаты вблизи ошибочных записей – фильтр позволяет отфильтровать верные координаты вблизи ошибочных.
•до ошибочных записей, с – в течение указанного времени до ошибочных записей все верные координаты будут отфильтрованы. Время необходимо указывать в секундах.
•после ошибочных записей, с – в течение указанного времени после ошибочных записей прибор будет пропускать верные координаты. Время необходимо указывать в секундах.
Максимальная угловая скорость, °/с – фильтр позволяет отфильтровать координаты, если вычисленная по ним угловая скорость будет больше максимального значения. Порог угловой скорости необходимо задавать в °/с (градусы в секунду).
Максимальное ускорение, м/с2 – если вычисленное по координатам ускорение превышает максимально допустимое значение (в м/с2), то эти координаты считаются недостоверными и будут отфильтрованы.
Минимальное ускорение, м/с2 – если вычисленное по координатам ускорение ниже минимально допустимого значения (в м/с2), то эти координаты считаются недостоверными и будут отфильтрованы.